SISTEMAS DE CONTROLE I
Considere o sistema representado pelo diagrama de blocos abaixo:
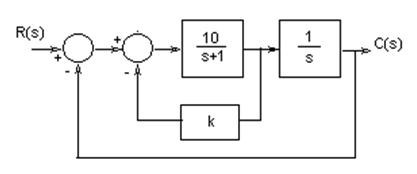
Considere as afirmativas:
I - A frequência natural do sistema não varia, se o valor de K variar
II - O fator de amortecimento do sistema aumenta com o aumento do valor de K
III - Não existe valor de K que torna o sistema criticamente amortecido
IV - O valor de K não influencia no tempo de acomodação do sistema
V - O sistema não apresentará resposta oscilatória, independente do valor de K
VI - O erro de resposta ao degrau sempre será zero, para qualquer valor de K
Marque a alternativa correta.
I, II, III e VI
II, V e VI
I, II, V e VI
I, II e VI
I, V e VI
Um sistema de controle apresenta o seguinte diagrama de polos e zeros:

Sua função de transferência é:
/(s^3+4.s^2+4,75.s+1,5)")
/(s^3+4.s^2+4,75.s+1,5)")
/(s^3+4.s^2+4,75.s+1,5)")
/(s^3+4.s^2+5.s+1,5)")
/(s^3+4.s^2+4,75.s+1)")
A figura abaixo mostra o diagrama de blocos de um servo-sistema posicionador de braço de robô.
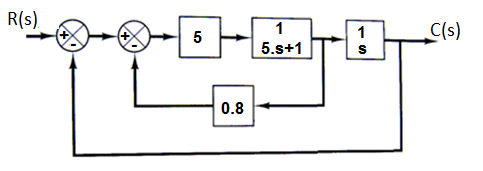
Tendo como referência a função de transferência C(s)/R(s), analise as afirmativas abaixo.
I - O ganho do servo-sistema é 10.
II - Os pólos do sistema são -0.5 + j0.87 e -0.5 - j0.87.
III - O sistema tem apenas um zero, de valor -1.
IV -O servosistema tem função de transferência de 2ª ordem.
V - O numerador da função de transferência é dado pelo polinômio (s+1).
VI - O denominador da função de transferência do servosistema é s2+s+1
VII - Se for aplicado um degrau unitário na entrada, a posição final da saída do servosistema tenderá a 1.
Assinale a alternativa correta.
II , IV , VI , VII
III , II , IV , VI
II , III, IV , VI , VII
III , IV , VI , VII
II , IV , V , VII
O amplificador operacional é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle. Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não existe diferença de potencial entre os mesmos (estão em "curto-circuito virtual").
No sistema abaixo, empregando-se essas considerações, chega-se ao conjunto de equações dado:

Considerando a função de transferência do sistema Eo(s)/Ei(s), analise as afirmativas abaixo:
I - O sistema terá um zero em s=0
II - O sistema terá um pólo em s =-1/(R1.C)
III - função de transferência será do tipo K/(T.s+1), onde K= (R1+R2)/R1 e T= R1.C
IV - tensão de saída eo(t) em regime permanente sempre será maior que a tensão de entrada ei(t)
São verdadeiras as afirmativas:
II, III e IV
I, II e IV
II e III
I, II, III e IV
I, II e III
A habilidade de utilização de modelos para a representação de sistemas é de extrema importância para o exercício profissional da engenharia. O Engenheiro deve ser capaz de representar sistemas físicos por modelos matemáticos, diagramáticos, icônicos, esquemáticos, dentre outros.
A Figura abaixo apresente o modelo esquemático para um sistema elétrico, e o modelo diagramático correspondente.
Analisando as informações contidas nos dois tipos de modelo, associe cada seta do diagrama de blocos, enumeradas na coluna da esquerda, com a respectiva grandeza física do esquema elétrico, relacionadas na coluna da direita:
( 1 ) Seta 1
( ) Corresponde à corrente no indutor L1
( 2 ) Seta 2
( ) Corresponde à corrente no indutor L2
( 3 ) Seta 3
( ) Corresponde à tensão no capacitor
( 4 ) Seta 4
( ) Corresponde à tensão no resistor
( 5 ) Seta 5
( ) Corresponde à tensão no indutor L1
( 6 ) Seta 6
( ) Corresponde à tensão no indutor L2
A coluna da direita, na forma transposta, terá a seguinte sequência de numeração:
2, 4, 3, 6, 1, 5
4, 2, 3, 6, 1, 5
2, 4, 3, 1, 6, 5
2, 4, 6, 3, 1, 5
3, 2, 4, 6, 1, 5
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.

O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
Com relação ao controle de temperatura da água a ser fornecida pelo sistema, avalie as afirmativas:
I - Aumentos e diminuições repentinas de demanda por água quente inviabiliza o controle em malha aberta;
II - Um sistema de malha fechada poderá compensar variações de demanda, evitando variações indesejáveis de temperatura, atuando na vazão de vapor;
III - O controle em malha aberta faz com que a vazão de vapor compense perturbações nas variáveis do sistema;
IV - Variação na temperatura da água fria que entra no reservatório pode comprometer o desempenho do controle, se este for feito em malha aberta.
V - Os sistema de controle sendo feito em malha fechada permite compensar variações na temperatura de saída, provocadas por perturbações externas.
Dentre as alternativas seguintes marque a que contém o maior número de afirmativas corretas:
I, II, IV e V
II, III, IV e V
I, II, III e IV
I, II, IV
I, II, V
Um sistema de 2a. ordem tem fator de amortecimento 0,24 e frequência natural de 4,12 rad/s. Ao receber um sinal de excitação degrau unitário apresentou a seguinte resposta:

O instante de ocorrência de máximo overshoot, o tempo de duração do transitório, e o sobressinal percentual máximo são dados, respectivamente, pelos valores:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
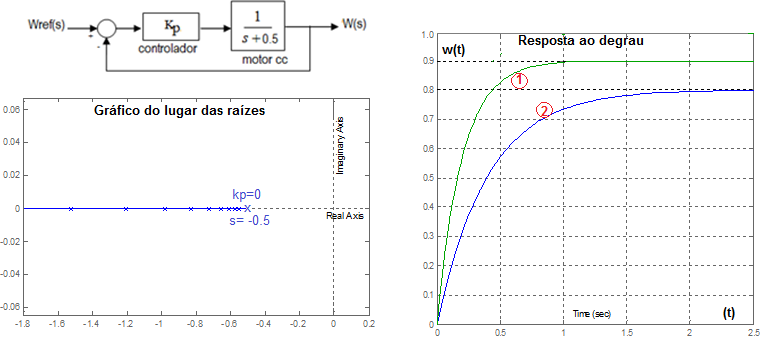
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
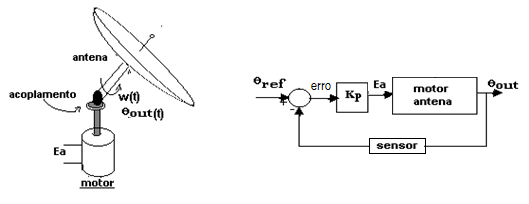
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
I, II, III e VI
II, V e VI
I, II, V e VI
I, II e VI
I, V e VI
Um sistema de controle apresenta o seguinte diagrama de polos e zeros:
Sua função de transferência é:
A figura abaixo mostra o diagrama de blocos de um servo-sistema posicionador de braço de robô.
Tendo como referência a função de transferência C(s)/R(s), analise as afirmativas abaixo.
I - O ganho do servo-sistema é 10.
II - Os pólos do sistema são -0.5 + j0.87 e -0.5 - j0.87.
III - O sistema tem apenas um zero, de valor -1.
IV -O servosistema tem função de transferência de 2ª ordem.
V - O numerador da função de transferência é dado pelo polinômio (s+1).
VI - O denominador da função de transferência do servosistema é s2+s+1
VII - Se for aplicado um degrau unitário na entrada, a posição final da saída do servosistema tenderá a 1.
Assinale a alternativa correta.
II , IV , VI , VII
III , II , IV , VI
II , III, IV , VI , VII
III , IV , VI , VII
II , IV , V , VII
O amplificador operacional é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle. Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não existe diferença de potencial entre os mesmos (estão em "curto-circuito virtual").
No sistema abaixo, empregando-se essas considerações, chega-se ao conjunto de equações dado:
Considerando a função de transferência do sistema Eo(s)/Ei(s), analise as afirmativas abaixo:
I - O sistema terá um zero em s=0
II - O sistema terá um pólo em s =-1/(R1.C)
III - função de transferência será do tipo K/(T.s+1), onde K= (R1+R2)/R1 e T= R1.C
IV - tensão de saída eo(t) em regime permanente sempre será maior que a tensão de entrada ei(t)
São verdadeiras as afirmativas:
II, III e IV
I, II e IV
II e III
I, II, III e IV
I, II e III
A habilidade de utilização de modelos para a representação de sistemas é de extrema importância para o exercício profissional da engenharia. O Engenheiro deve ser capaz de representar sistemas físicos por modelos matemáticos, diagramáticos, icônicos, esquemáticos, dentre outros.
A Figura abaixo apresente o modelo esquemático para um sistema elétrico, e o modelo diagramático correspondente.
Analisando as informações contidas nos dois tipos de modelo, associe cada seta do diagrama de blocos, enumeradas na coluna da esquerda, com a respectiva grandeza física do esquema elétrico, relacionadas na coluna da direita:
( 1 ) Seta 1
( ) Corresponde à corrente no indutor L1
( 2 ) Seta 2
( ) Corresponde à corrente no indutor L2
( 3 ) Seta 3
( ) Corresponde à tensão no capacitor
( 4 ) Seta 4
( ) Corresponde à tensão no resistor
( 5 ) Seta 5
( ) Corresponde à tensão no indutor L1
( 6 ) Seta 6
( ) Corresponde à tensão no indutor L2
A coluna da direita, na forma transposta, terá a seguinte sequência de numeração:
2, 4, 3, 6, 1, 5
4, 2, 3, 6, 1, 5
2, 4, 3, 1, 6, 5
2, 4, 6, 3, 1, 5
3, 2, 4, 6, 1, 5
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
Com relação ao controle de temperatura da água a ser fornecida pelo sistema, avalie as afirmativas:
I - Aumentos e diminuições repentinas de demanda por água quente inviabiliza o controle em malha aberta;
II - Um sistema de malha fechada poderá compensar variações de demanda, evitando variações indesejáveis de temperatura, atuando na vazão de vapor;
III - O controle em malha aberta faz com que a vazão de vapor compense perturbações nas variáveis do sistema;
IV - Variação na temperatura da água fria que entra no reservatório pode comprometer o desempenho do controle, se este for feito em malha aberta.
V - Os sistema de controle sendo feito em malha fechada permite compensar variações na temperatura de saída, provocadas por perturbações externas.
Dentre as alternativas seguintes marque a que contém o maior número de afirmativas corretas:
I, II, IV e V
II, III, IV e V
I, II, III e IV
I, II, IV
I, II, V
Um sistema de 2a. ordem tem fator de amortecimento 0,24 e frequência natural de 4,12 rad/s. Ao receber um sinal de excitação degrau unitário apresentou a seguinte resposta:
O instante de ocorrência de máximo overshoot, o tempo de duração do transitório, e o sobressinal percentual máximo são dados, respectivamente, pelos valores:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
A figura abaixo mostra o diagrama de blocos de um servo-sistema posicionador de braço de robô.
Tendo como referência a função de transferência C(s)/R(s), analise as afirmativas abaixo.
I - O ganho do servo-sistema é 10.
II - Os pólos do sistema são -0.5 + j0.87 e -0.5 - j0.87.
III - O sistema tem apenas um zero, de valor -1.
IV -O servosistema tem função de transferência de 2ª ordem.
V - O numerador da função de transferência é dado pelo polinômio (s+1).
VI - O denominador da função de transferência do servosistema é s2+s+1
VII - Se for aplicado um degrau unitário na entrada, a posição final da saída do servosistema tenderá a 1.
Assinale a alternativa correta.
II , IV , VI , VII
III , II , IV , VI
II , III, IV , VI , VII
III , IV , VI , VII
II , IV , V , VII
O amplificador operacional é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle. Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não existe diferença de potencial entre os mesmos (estão em "curto-circuito virtual").
No sistema abaixo, empregando-se essas considerações, chega-se ao conjunto de equações dado:
Considerando a função de transferência do sistema Eo(s)/Ei(s), analise as afirmativas abaixo:
I - O sistema terá um zero em s=0
II - O sistema terá um pólo em s =-1/(R1.C)
III - função de transferência será do tipo K/(T.s+1), onde K= (R1+R2)/R1 e T= R1.C
IV - tensão de saída eo(t) em regime permanente sempre será maior que a tensão de entrada ei(t)
São verdadeiras as afirmativas:
II, III e IV
I, II e IV
II e III
I, II, III e IV
I, II e III
A habilidade de utilização de modelos para a representação de sistemas é de extrema importância para o exercício profissional da engenharia. O Engenheiro deve ser capaz de representar sistemas físicos por modelos matemáticos, diagramáticos, icônicos, esquemáticos, dentre outros.
A Figura abaixo apresente o modelo esquemático para um sistema elétrico, e o modelo diagramático correspondente.
Analisando as informações contidas nos dois tipos de modelo, associe cada seta do diagrama de blocos, enumeradas na coluna da esquerda, com a respectiva grandeza física do esquema elétrico, relacionadas na coluna da direita:
( 1 ) Seta 1
( ) Corresponde à corrente no indutor L1
( 2 ) Seta 2
( ) Corresponde à corrente no indutor L2
( 3 ) Seta 3
( ) Corresponde à tensão no capacitor
( 4 ) Seta 4
( ) Corresponde à tensão no resistor
( 5 ) Seta 5
( ) Corresponde à tensão no indutor L1
( 6 ) Seta 6
( ) Corresponde à tensão no indutor L2
A coluna da direita, na forma transposta, terá a seguinte sequência de numeração:
2, 4, 3, 6, 1, 5
4, 2, 3, 6, 1, 5
2, 4, 3, 1, 6, 5
2, 4, 6, 3, 1, 5
3, 2, 4, 6, 1, 5
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
Com relação ao controle de temperatura da água a ser fornecida pelo sistema, avalie as afirmativas:
I - Aumentos e diminuições repentinas de demanda por água quente inviabiliza o controle em malha aberta;
II - Um sistema de malha fechada poderá compensar variações de demanda, evitando variações indesejáveis de temperatura, atuando na vazão de vapor;
III - O controle em malha aberta faz com que a vazão de vapor compense perturbações nas variáveis do sistema;
IV - Variação na temperatura da água fria que entra no reservatório pode comprometer o desempenho do controle, se este for feito em malha aberta.
V - Os sistema de controle sendo feito em malha fechada permite compensar variações na temperatura de saída, provocadas por perturbações externas.
Dentre as alternativas seguintes marque a que contém o maior número de afirmativas corretas:
I, II, IV e V
II, III, IV e V
I, II, III e IV
I, II, IV
I, II, V
Um sistema de 2a. ordem tem fator de amortecimento 0,24 e frequência natural de 4,12 rad/s. Ao receber um sinal de excitação degrau unitário apresentou a seguinte resposta:
O instante de ocorrência de máximo overshoot, o tempo de duração do transitório, e o sobressinal percentual máximo são dados, respectivamente, pelos valores:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
II , IV , VI , VII
III , II , IV , VI
II , III, IV , VI , VII
III , IV , VI , VII
II , IV , V , VII
O amplificador operacional é um dispositivo utilizado em várias aplicações em circuitos eletrônicos de instrumentação e controle. Sua versatilidade deriva das características de altíssimo ganho, impedância de entrada elevada e impedância de saída baixa.
Para modelar sistemas com AO, assume-se que não entra corrente nos terminais (+) e (-) (impedância de entrada infinita), e que não existe diferença de potencial entre os mesmos (estão em "curto-circuito virtual").
No sistema abaixo, empregando-se essas considerações, chega-se ao conjunto de equações dado:
Considerando a função de transferência do sistema Eo(s)/Ei(s), analise as afirmativas abaixo:
I - O sistema terá um zero em s=0
II - O sistema terá um pólo em s =-1/(R1.C)
III - função de transferência será do tipo K/(T.s+1), onde K= (R1+R2)/R1 e T= R1.C
IV - tensão de saída eo(t) em regime permanente sempre será maior que a tensão de entrada ei(t)
São verdadeiras as afirmativas:
II, III e IV
I, II e IV
II e III
I, II, III e IV
I, II e III
A habilidade de utilização de modelos para a representação de sistemas é de extrema importância para o exercício profissional da engenharia. O Engenheiro deve ser capaz de representar sistemas físicos por modelos matemáticos, diagramáticos, icônicos, esquemáticos, dentre outros.
A Figura abaixo apresente o modelo esquemático para um sistema elétrico, e o modelo diagramático correspondente.
Analisando as informações contidas nos dois tipos de modelo, associe cada seta do diagrama de blocos, enumeradas na coluna da esquerda, com a respectiva grandeza física do esquema elétrico, relacionadas na coluna da direita:
( 1 ) Seta 1
( ) Corresponde à corrente no indutor L1
( 2 ) Seta 2
( ) Corresponde à corrente no indutor L2
( 3 ) Seta 3
( ) Corresponde à tensão no capacitor
( 4 ) Seta 4
( ) Corresponde à tensão no resistor
( 5 ) Seta 5
( ) Corresponde à tensão no indutor L1
( 6 ) Seta 6
( ) Corresponde à tensão no indutor L2
A coluna da direita, na forma transposta, terá a seguinte sequência de numeração:
2, 4, 3, 6, 1, 5
4, 2, 3, 6, 1, 5
2, 4, 3, 1, 6, 5
2, 4, 6, 3, 1, 5
3, 2, 4, 6, 1, 5
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
Com relação ao controle de temperatura da água a ser fornecida pelo sistema, avalie as afirmativas:
I - Aumentos e diminuições repentinas de demanda por água quente inviabiliza o controle em malha aberta;
II - Um sistema de malha fechada poderá compensar variações de demanda, evitando variações indesejáveis de temperatura, atuando na vazão de vapor;
III - O controle em malha aberta faz com que a vazão de vapor compense perturbações nas variáveis do sistema;
IV - Variação na temperatura da água fria que entra no reservatório pode comprometer o desempenho do controle, se este for feito em malha aberta.
V - Os sistema de controle sendo feito em malha fechada permite compensar variações na temperatura de saída, provocadas por perturbações externas.
Dentre as alternativas seguintes marque a que contém o maior número de afirmativas corretas:
I, II, IV e V
II, III, IV e V
I, II, III e IV
I, II, IV
I, II, V
Um sistema de 2a. ordem tem fator de amortecimento 0,24 e frequência natural de 4,12 rad/s. Ao receber um sinal de excitação degrau unitário apresentou a seguinte resposta:
O instante de ocorrência de máximo overshoot, o tempo de duração do transitório, e o sobressinal percentual máximo são dados, respectivamente, pelos valores:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
II, III e IV
I, II e IV
II e III
I, II, III e IV
I, II e III
A habilidade de utilização de modelos para a representação de sistemas é de extrema importância para o exercício profissional da engenharia. O Engenheiro deve ser capaz de representar sistemas físicos por modelos matemáticos, diagramáticos, icônicos, esquemáticos, dentre outros.
A Figura abaixo apresente o modelo esquemático para um sistema elétrico, e o modelo diagramático correspondente.
Analisando as informações contidas nos dois tipos de modelo, associe cada seta do diagrama de blocos, enumeradas na coluna da esquerda, com a respectiva grandeza física do esquema elétrico, relacionadas na coluna da direita:
( 1 ) Seta 1
( ) Corresponde à corrente no indutor L1
( 2 ) Seta 2
( ) Corresponde à corrente no indutor L2
( 3 ) Seta 3
( ) Corresponde à tensão no capacitor
( 4 ) Seta 4
( ) Corresponde à tensão no resistor
( 5 ) Seta 5
( ) Corresponde à tensão no indutor L1
( 6 ) Seta 6
( ) Corresponde à tensão no indutor L2
A coluna da direita, na forma transposta, terá a seguinte sequência de numeração:
2, 4, 3, 6, 1, 5
4, 2, 3, 6, 1, 5
2, 4, 3, 1, 6, 5
2, 4, 6, 3, 1, 5
3, 2, 4, 6, 1, 5
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
Com relação ao controle de temperatura da água a ser fornecida pelo sistema, avalie as afirmativas:
I - Aumentos e diminuições repentinas de demanda por água quente inviabiliza o controle em malha aberta;
II - Um sistema de malha fechada poderá compensar variações de demanda, evitando variações indesejáveis de temperatura, atuando na vazão de vapor;
III - O controle em malha aberta faz com que a vazão de vapor compense perturbações nas variáveis do sistema;
IV - Variação na temperatura da água fria que entra no reservatório pode comprometer o desempenho do controle, se este for feito em malha aberta.
V - Os sistema de controle sendo feito em malha fechada permite compensar variações na temperatura de saída, provocadas por perturbações externas.
Dentre as alternativas seguintes marque a que contém o maior número de afirmativas corretas:
I, II, IV e V
II, III, IV e V
I, II, III e IV
I, II, IV
I, II, V
Um sistema de 2a. ordem tem fator de amortecimento 0,24 e frequência natural de 4,12 rad/s. Ao receber um sinal de excitação degrau unitário apresentou a seguinte resposta:
O instante de ocorrência de máximo overshoot, o tempo de duração do transitório, e o sobressinal percentual máximo são dados, respectivamente, pelos valores:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
2, 4, 3, 6, 1, 5
4, 2, 3, 6, 1, 5
2, 4, 3, 1, 6, 5
2, 4, 6, 3, 1, 5
3, 2, 4, 6, 1, 5
A figura apresenta um exemplo de sistema físico que realiza um processo de aquecimento de água.
O reservatório possui uma entrada para receber água fria , e fornece água quente na tubulação de saída.
O processo de aquecimento consiste em injetar vapor na tubulação interna ao aquecedor a altíssimas temperaturas, e por contato transferir energia térmica para a água, provocando a mudança de temperatura.
Com relação ao controle de temperatura da água a ser fornecida pelo sistema, avalie as afirmativas:
I - Aumentos e diminuições repentinas de demanda por água quente inviabiliza o controle em malha aberta;
II - Um sistema de malha fechada poderá compensar variações de demanda, evitando variações indesejáveis de temperatura, atuando na vazão de vapor;
III - O controle em malha aberta faz com que a vazão de vapor compense perturbações nas variáveis do sistema;
IV - Variação na temperatura da água fria que entra no reservatório pode comprometer o desempenho do controle, se este for feito em malha aberta.
V - Os sistema de controle sendo feito em malha fechada permite compensar variações na temperatura de saída, provocadas por perturbações externas.
Dentre as alternativas seguintes marque a que contém o maior número de afirmativas corretas:
I, II, IV e V
II, III, IV e V
I, II, III e IV
I, II, IV
I, II, V
Um sistema de 2a. ordem tem fator de amortecimento 0,24 e frequência natural de 4,12 rad/s. Ao receber um sinal de excitação degrau unitário apresentou a seguinte resposta:
O instante de ocorrência de máximo overshoot, o tempo de duração do transitório, e o sobressinal percentual máximo são dados, respectivamente, pelos valores:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
I, II, IV e V
II, III, IV e V
I, II, III e IV
I, II, IV
I, II, V
Um sistema de 2a. ordem tem fator de amortecimento 0,24 e frequência natural de 4,12 rad/s. Ao receber um sinal de excitação degrau unitário apresentou a seguinte resposta:
O instante de ocorrência de máximo overshoot, o tempo de duração do transitório, e o sobressinal percentual máximo são dados, respectivamente, pelos valores:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
0.79 segundos , 29.4 segundos e 46%
0.79 segundos , 5 segundos e 146%
0.79 segundos , 5 segundos e 46%
13.09 segundos , 29.4 segundos e 46%
13.09 segundos , 29.4 segundos e 146%
A figura abaixo apresenta o diagrama de blocos de um sistema de controle de velocidade de motor, com ganho proporcional Kp, e seu gráfico do lugar das raízes.
Apresenta ainda a resposta ao degrau unitário do sistema, para dois valores distintos de Kp.
Tendo como referência as informações fornecidas pela figura, analise as afirmativas:
I - Quanto maior o ganho Kp, menor será a constante de tempo do sistema;
II - Quanto maior o valor de Kp, menor será o erro de regime, na resposta ao degrau;
III - Da curva de resposta 1 para a 2 o ganho Kp aumentou, pois o tempo de acomodação aumentou
IV - Para acelerar a resposta transitória do motor, e atingir maior valor de velocidade de regime, é necessário aumentar o valor de Kp
Marque, dentre as opções abaixo, as afirmativas corretas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
I, II, III, e IV
II e IV
II, III e IV
I, II e III
I, II e IV
Um sistema de controle de posição é utilizado para alinhar uma antena receptora de sinais de satélite, e consiste de um motor elétrico que é acoplado por engrenagens ao braço mecânico móvel da antena, conforme ilustra a figura abaixo.
A partir de ensaios práticos, observou-se que ao aplicar Ea=100 volts nos terminais do motor, a velocidade de rotação w(t) atinge 50 rpm, num tempo aproximado de 10 segundos, permitindo representar o motor por um sistema modelo de 1ª ordem.
Considerando que se deseja controlar a posição da antena, de acordo com a diagrama de blocos dado, determine a função de transferência θout(s)/ θref(s) em função de Kp, considerando o sensor com ganho unitário.
Avalie as afirmativas abaixo quanto à sua veracidade:
(1) - A função de transferência ω(s)/Ea(s) é de primeira ordem, com ganho finito
(2) - A função de transferência θout(s)/Ea(s) é de segunda ordem, com ganho infinito.
(3) - O ganho de malha fechada é unitário, e portanto o sistema conseguirá posicionar a antena com erro zero.
(4) - O fator de amortecimento do sistema aumenta, se o ganho Kp for aumentado.
(5) - A frequência natural do sistema aumenta, se o ganho Kp for reduzido.
(6) - O ganho de malha fechada mantém-se constante, mesmo se o valor de Kp variar.
(7) - Dependendo do valor de Kp, o sistema pode ser criticamente ou sobreamortecido ou subamortecido.
(8) - Dependendo dos valores de Kp, os pólos podem ser reais iguais, reais distintos ou complexos conjugados
Estão corretas as afirmativas:
